First 3-D look at an underwater canyon
environmentfreedivingcoral reefextended rangebiodiversityunderwater canyonmarine robots
For the first time, researchers managed to capture three-dimensional images of an underwater canyon.
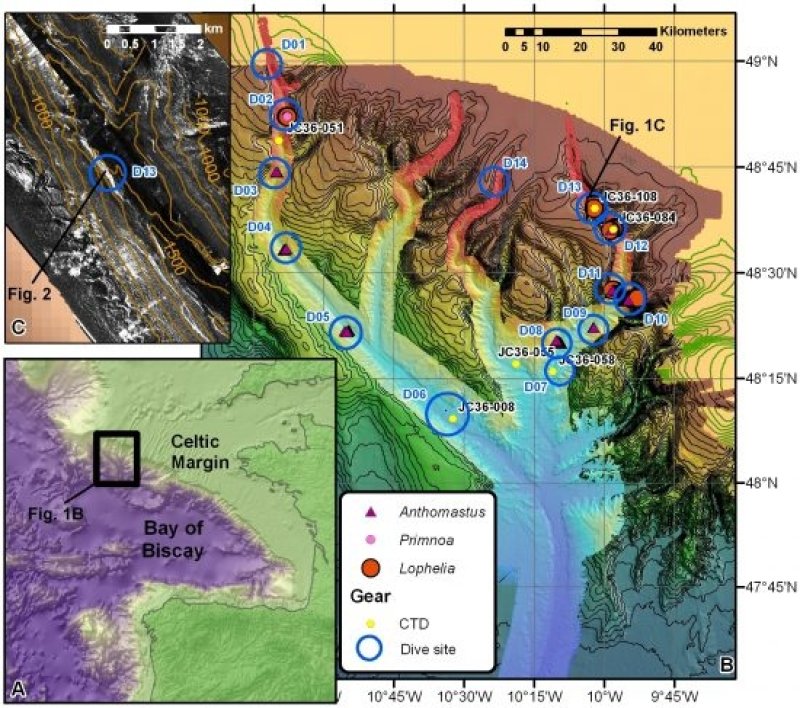
The star of this project was Whittard Canyon in the Bay of Biscay. The 3-D mapping was achieved using two marine robots and ship-based measuring instruments and the resulting images were amazing.
For their hard work, researchers now have maps at different scales, ranging from the entire length of the canyon to the size of the single cold-water coral polyp (representing the smallest unit).
These ‘nested’ maps work on the basis of Russian Matryoshka dolls, in that the smaller, more detailed map is part of a larger-scale map, which in turn is part of yet another larger map.
Underwater canyons are one of the most complex habitats in the world and are considered biodiversity hotspots. Similar to land-based canyons, they may have steep sides with vertical cliffs and overhanging rock formations. In the past, they were out of reach of conventional marine imaging technology and remained the forgotten habitats of the deep sea – but no longer.
Now, our advanced robotics and technologies can collect data in these hard-to-reach areas, giving us a glimpse into the biodiversity patterns and its underlying processes.
In the case of Whittard Canyon, echo-sounders on board the RRS James Cook create a 200-km map of the canyon at 50m/pixel resolution. The vertical walls of the canyon were mapped using a newly developed, sideways-directed "Autosub6000" robot-sub, at 3 to 5 metres per pixel resolution.
At the same time, the "Isis" ROV recorded HD video and also collected biological and geological samples from the vertical and overhanging points. It does this while suspended on a tether from above by the RRS James Cook.
The data collected by the "Isis" ROV was used to create very detailed maps at resolutions of 10 to 20cm.
Leading the five-week expedition was Dr Veerle Huvenne, from the NOC. He described the canyon as spectacular, saying that, "Our robot vehicles images rich communities of cold-water corals, clams, deep-sea oysters and their associated fauna, including a broad range of fish species. We also captured amazing footage of blue sharks and swordfish when the Isis marine robot was travelling to and from the seabed."
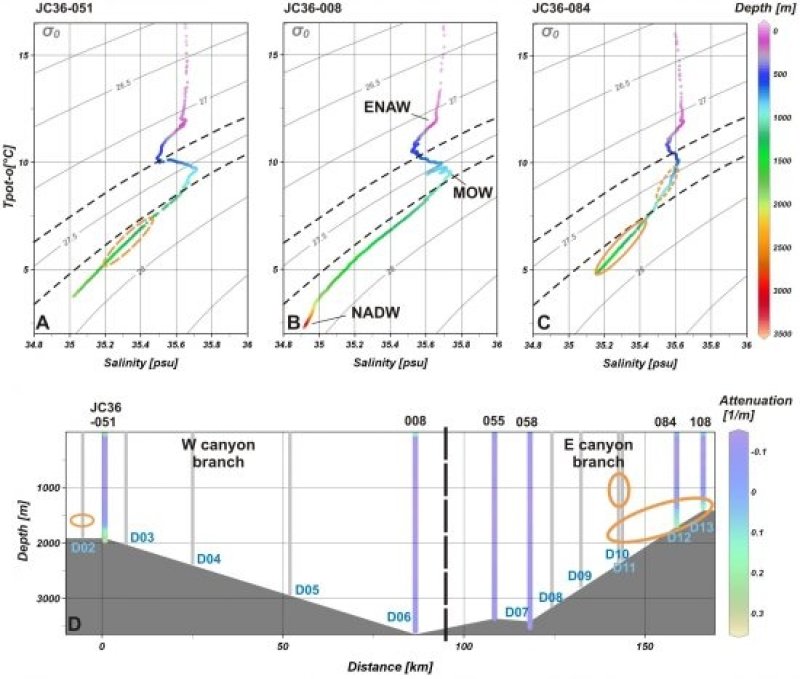
Indeed, the Whittard Canyon has proved to be a very dynamic environment with strong internal tidal flows, containing deep plumes of organic-rich sediment.
To examine these oceanographic processes, a robotic glider was used to continuously monitor the water column. This yielded a surprising discovery: the presence of internal waves that were as high as 80 metres.
本文为自动翻译,可能存在细微误差;如有疑问,请参阅英文原文。